References
Header image courtesy of John Deere Forestry
[1] D. Eriksson, and R. Ghabcheloo. Comparison of machine learning methods for automatic bucket filling: An imitation learning approach. Automation in Construction, 2023
[2] D. Eriksson, R. Ghabcheloo, M. Geimer. Towards multiple material loading using transfer learning. The 18th Scandinavian International Conference on Fluid Power, SICFP’23, May30 -June 1, 2023, Tamperee, Finland.
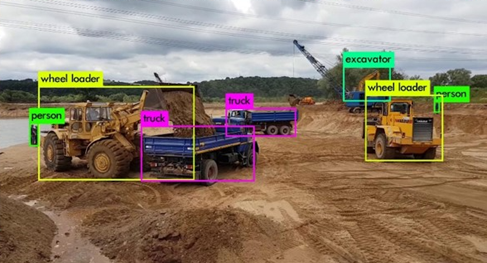
[3] Yusheng Xiang, Hongzhe Wang, Tianqing Su, Ruoyu Li, Christine Brach, Samuel S. Mao, Marcus Geimer. KIT MOMA: A mobile machines dataset. IEEE Access, 2020
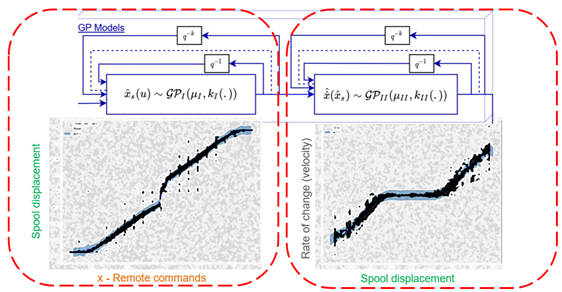
[4] A. Taheri, P. Gustafsson, M. Rösth, R. Ghabcheloo, and J. Pajarinen. Nonlinear model learning for compensation and feedforward control of real-world hydraulic actuators using gaussian processes. IEEE Robotics and Automation Letters, 2022.
[5] A. Taheri, R. Pettersson, P. Gustafsson, J. Pajarinen, and R. Ghabcheloo. Towards Energy Efficient Control for Commercial Heavy-Duty Mobile Cranes: Modeling Hydraulic Pressures using Machine Learning. The 18th Scandinavian International Conference on Fluid Power, SICFP’23, May 30- June 1, 2023, Tampere, Finland
[6] A. Taheri, J. Pajarinen, and R. Ghabcheloo. GPU-accelerated policy optimization via batch automatic differentiation of gaussian processes for real-world control. 2022 International Conference on Robotics and Automation (ICRA)
[7] A. Paszke et al. PyTorch: An imperative style, high-performance deep learning library. Advances in neural information processing systems, vol. 32, pp. 8026–8037, 2019.